����PLC�Ě��(d��ng)������Pʽ���I(y��)�C(j��)е���O(sh��)Ӌ(j��)
������ļӹ��^�������ڰ�İ��\(y��n)�ęC(j��)е�֞��о���(du��)������ԓ�C(j��)е�ֵı��w�Y(ji��)��(g��u)���C(j��)е�ֲ��Ú��(d��ng)������P����C(j��)е�ֵ�ĩ�ˈ�(zh��)��������4 ��(g��)���ɶȡ�Ԕ��(x��)�U������ĩ�ˈ�(zh��)�����P(gu��n)�I����(sh��)���O(sh��)Ӌ(j��)Ӌ(j��)�㡣��(sh��)�`�C����ԓ�C(j��)е������ɝM�����a(ch��n)����Ҫ��
0������
�����S�����I(y��)���a(ch��n)Ҏ(gu��)ģ�IJ����U(ku��)�����a(ch��n)�����Ԅ�(d��ng)��ˮƽ횴�����ߣ��e���ڸߜء����d�������Ȑ��ӵĹ����h(hu��n)���У��˹������ڄ�(d��ng)��(qi��ng)�ȴ��װl(f��)����ȫ�¹�[1]��ij��˾�İ�����a(ch��n)���ϣ���Ľ�(j��ng)�ۻ����T���Σ����M(j��n)�д��и �и����Ѱ�İ��\(y��n)��ָ������С����ء��Π�������˹����\(y��n)Ч�ʵͣ�����T���࣬���װl(f��)����ײ��Ӱ푰�ĵĺ��m(x��)�ӹ������O(sh��)Ӌ(j��)�Ĺ��I(y��)�C(j��)е�ֲ���������P����C(j��)е�ֵ�ĩ�ˈ�(zh��)������ �������������ʽץȡ���������Ԅ�(d��ng)���\(y��n)���[2]��
1���C(j��)е�ֽY(ji��)��(g��u)
1.1���Y(ji��)��(g��u)Ҫ��
����ԓ�C(j��)е�ֵ������nj����и��İ��(�s10kg)�Ĺ����_(t��i)�ϰ��\(y��n)���ѷż܃�(n��i)��Ҫ��B����������ײ���Y(ji��)��(g��u)��Ҫ���܌�(sh��)�F(xi��n)X��Y��Z ����(g��)������Ƅ�(d��ng)����Z �S�����D(zhu��n)���Y(ji��)�ό�(sh��)�H���a(ch��n)����r����ռ��g(sh��)�W(w��ng)(http://203scouts.com/)�J(r��n)��C(j��)е��Ҫ�_(d��)������Ҫ��[3]��
����(1)�������C(j��)��(g��u)���M�ƙC(j��)��(g��u)��ץ�řC(j��)��(g��u)����(g��)�C(j��)��(g��u);
����(2)�����C(j��)��(g��u)�O(sh��)Ӌ(j��)��ֱ�����������ÝL��z�܂���(d��ng)����ֱ����U��(d��o)�����������ٶ����50mm/s�������г̷���0��1 800mm�������d��1 000N;
����(3)�M�ƙC(j��)��(g��u)�O(sh��)Ӌ(j��)��X��Y �ɂ�(g��)����M�ƣ����ÝL��z�ܺ�ͬ��������(d��ng)���Ƅ�(d��ng)�ٶ����50mm/s���Ƅ�(d��ng)�г̷���0��3 500mm�������d��1 000N;
����(4)ץ�řC(j��)��(g��u)�O(sh��)Ӌ(j��)�����Ú��(d��ng)��ʽ�M(j��n)�й�����ץ�ţ������������250N��
1.2�����w�Y(ji��)��(g��u)
����ԓ���I(y��)�C(j��)е����֧�ܡ��ֱۺ���צ�M�ɣ�4 ��(g��)���ɶȷքe�飺X��Y��Z ����(g��)������Ƅ�(d��ng)��Z �S���D(zhu��n)���D1 ���O(sh��)Ӌ(j��)�ęC(j��)е�ֿ��w�Y(ji��)��(g��u)�D�����w�O(sh��)Ӌ(j��)˼��飺X��Y��Z ����(g��)��������ŷ�늙C(j��)�(q��)��(d��ng)��ͨ�^�z�ܡ�ͬ������݆ϵ�șC(j��)е�C(j��)��(g��u)�M(j��n)���g�ӂ���(d��ng)��ĩ�ˈ�(zh��)��������(d��ng)���P��צ����ͨ�^��׃���Pλ�Ì�(sh��)�F(xi��n)��ͬ�Π����ץ�š�

�D1 �C(j��)е��ʾ��D
1.3������(d��ng)�^��
�����ѹ�����λ��1 ���\(y��n)��λ��2 ������ �C(j��)е�֏�ԭ�c(di��n)λ���_ʼ��X �S�ŷ�늙C(j��)�\(y��n)�D(zhu��n)����(d��ng)�b��ݔ���S�ϵ�ͬ����һ�����D(zhu��n)�� ��(j��ng)ͬ��������(d��ng)����(d��ng)�cX �Sƽ�е��S���D(zhu��n)���Ķ��(q��)��(d��ng)�C(j��)е�ֹ���ƽ�_(t��i)��X �S�����Ƅ�(d��ng)���o����Y �S�ŷ�늙C(j��)�\(y��n)�D(zhu��n)����(d��ng)�C(j��)е��ƽ�_(t��i)��Y �S�����Ƅ�(d��ng)�� Ȼ��Z �S�ŷ�늙C(j��)�\(y��n)�D(zhu��n)����(d��ng)��צ���Ə�λ��1 ץȡ����;��צ������X ������ˣ�Y �S�ŷ�늙C(j��)�\(y��n)�D(zhu��n)����(d��ng)�C(j��)е��ƽ�_(t��i)��Y �S�����Ƅ�(d��ng)���_(d��)λ��2 �Ϸ���Z �S�ŷ�늙C(j��)�\(y��n)�D(zhu��n)����(d��ng)��צ���ƷŹ���[4]��
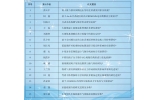
1.4���C(j��)е�օ���(sh��)
������1 ����(d��ng)���Pʽ���I(y��)�C(j��)е�ֵą���(sh��)��
��1 �C(j��)е�օ���(sh��)

2�������b���O(sh��)Ӌ(j��)
2.1��������Pԭ��
������D2 ��ʾ�� ���Ȍ�������Pͨ�^�ӹ��c����O(sh��)��(����հl(f��)������)��ͨ��Ȼ���c���������粣���������Ƚ��|������(d��ng)����O(sh��)��������ʹ���P��(n��i)�a(ch��n)��ؓ(f��)�≺���Ķ��������������Σ������_ʼ���ʹ��������(d��ng)����������͵�Ŀ�ĵؕr(sh��)��ƽ��(w��n)�س���M(j��n)������P��(n��i)��ʹ������P��(n��i)��ؓ(f��)�≺׃����≺���Ԟ����Ě≺�� ������P��Ó�x������� �Ķ��������������������΄�(w��)[5]��

�D2 ���P����ԭ��D
2.2��������Pֱ��Ӌ(j��)��
���������\(y��n)���w�������Q�����P�Ĵ�С�͔�(sh��)���� ����(j��)���a(ch��n)�����I(y��)Ҫ�����P�����r(sh��)��ˮƽ����B(t��i)�����Pֱ������(sh��)��Ӌ(j��)�㹫ʽ����[6]��

����ʽ��D - ���P����Փֱ����mm��m - ���������|(zh��)����kg��t - ��ȫϵ��(sh��)(ˮƽ��t≥4����ֱ��t≥8)��p - ���P��(n��i)����նȣ�MPa��n - ���P��(sh��)����
�������a(ch��n)��������\(y��n)�������ؼs100N�� ���P�����r(sh��)��ˮƽ����t ȡ4����ն�p ȡ0.06MPa�����(g��)���P����nȡ1������ʽ(1)��Ӌ(j��)�㣬�ã�
D≥92.16mm
������?y��n)�?sh��)�H���x���ֱ���ߴ緶����50mm �ԃ�(n��i)�����]��(sh��)�H�������Π�ڝM����Ҫ�ėl���£����P�ߴ瑪(y��ng)�M����С�������������P��(sh��)��n��ȡn=16������ʽ(1)��Ӌ(j��)�㣬�ã�
D′≥23.04mm
�����Y(ji��)�����Pֱ����(bi��o)��(zh��n)ȡֵ����ȡD=25mm��
2.3��������P������Ӌ(j��)��
��������(j��)���P��������Ӌ(j��)�㹫ʽ��

����ʽ��W - ���P��������N��T - ��ȫϵ��(sh��)(�ڴ�ȡT ��1)��S - ���P��e��cm2��
������Ҏ(gu��)���D =10mm��16mm��20mm��25mm��32mm��40mm��50mm ������ ����(j��)��ʽ(2) �քeӋ(j��)���������-400mmHg��-500mmHg ��-600mmHg ��ն��µ���������Ӌ(j��)��Y(ji��)�����2 ��ʾ��
��2 ���Pˮƽ������(N)

������(sh��)�Hʹ�Õr(sh��)��[W]=WT(3)ʽ��[W]���S��������������(j��)��(j��ng)�(y��n)ֵ����ȫϵ��(sh��)һ��ȡ2.5���F(xi��n)��ȡD=25mm �����P�M(j��n)���S���������ęz�(y��n)Ӌ(j��)�㣬����նȱ��^�͵���r��(-400mmHg)������1�еĔ�(sh��)ֵ26.7N ����ʽ(3)��Ӌ(j��)���[W]=10.68N���C(j��)е�ֹ�16 ��(g��)���P�����S����������170.88N>100N���ɴ˿ɵã��ڱ��C��ȫ����r�£��O(sh��)Ӌ(j��)Ӌ(j��)�����Ô�(sh��)��(j��)�ܴ_�����������\(y��n)������
3���Y(ji��)���Z
����ͨ�^��(du��)���I(y��)�C(j��)е�ֱ��w�C(j��)��(g��u)���P(gu��n)�I�㲿���M(j��n)���O(sh��)Ӌ(j��)Ӌ(j��)�㣬 ����ԓ���(d��ng)���Pʽ���I(y��)�C(j��)е���ڌ�(sh��)�H���a(ch��n)�����M(j��n)���{(di��o)ԇ�\(y��n)�к�[7]���C��(sh��)�C(j��)е���܌�(du��)�����M(j��n)���Ԅ�(d��ng)ץ�ń�(d��ng)��������ץ���^���в��l(f��)����ײ����(sh��)�`�C��ʹ��ԓ�C(j��)е�ֺ���I(y��)�F(xi��n)�������ˆT��(sh��)��������50%���ڽ����˄ڄ�(d��ng)���ɱ���ͬ�r(sh��)��������a(ch��n)�ʡ�
�����īI(xi��n)
����[1] ������,���܊.�\Մ���(d��ng)�ܷ���O(sh��)Ӌ(j��)[J].Һ�����(d��ng)�c�ܷ�,2012,(2):11-13.
���� [2] ����Ӣ,�����,��־��.����PLC �����ϰ��\(y��n)�C(j��)е���O(sh��)Ӌ(j��)[J].�C(j��)е���̎�,2010,(9):83-84.
���� [3] ��,���ӡ,������.оƬ���\(y��n)�C(j��)е���O(sh��)Ӌ(j��)[J].�C(j��)е�O(sh��)Ӌ(j��)�c����,2011,(10):35-36.
���� [4] ����Ӣ.����PLC ��ע�ܙC(j��)�C(j��)е�ֿ���ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J].�C(j��)е���̎�,2011,(11):72-73.
���� [5] ���,�����,���^��,��.�AƬ�����C(j��)�ĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)[J].�C(j��)늹��̼��g(sh��),2011,40(7):60-62.
���� [6] ���d��,���h(yu��n)��,����.�ݵ����\(y��n)�ּ�(j��)�C(j��)е���O(sh��)Ӌ(j��)���о�[J].����I(y��)�Ԅ�(d��ng)��,2011,33(7):1-4.
���� [7] ����܊.���\(y��n)�C(j��)е�ּ�PLC ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J].Һ�����(d��ng)�c�ܷ�,2010,(10):16-18.