�༉צ��ʽ��ձ�ԭ������
�����༉צ����ʽ��ձ��ĽY��������������ġ��w�e���ܺĵ����������dz���Ҫ�����á����Ľ�B�˱����ʺ̿Ƽ��������ͽY��———������צ�Y��������ԭ���͇��H�����ăɷN�Y����������(��)�ͷ�צ��(Ӣ��)���˽�B�͌��ȣ��f��������צ�Y�����Դ���ȿs�̱õ��L�ȡ����s�����IJ��ϡ���߳��Ч�ʡ����ͼӹ����ȡ���߳�����ܣ���צ��ʽ��ձõİlչ���ռ��кܺõ��Ƅ����á�
�����༉צ��ʽ��ձ��������oĩ���ٰlչ���������(׃�ݷe)��ձã���ռ��g�W(http://203scouts.com/)�{������������ͻ�����c����ǻ�ȟo�͡������������]������Ⱦ������ֱ�Ŵ�⡢�αþ����_��3 Pa �ȣ�������ИI�õ��˷dz��V���đ��ã�������ͷ�Cе���Լ����y��ձ�������������Խ��Խ��Խ�V���đ����ں��졢�˹��I����������ˎ���h�����ИI����������������څ�ݡ�����Ҫ�ĽY����ʽ�������ͺͷ�צ�ͣ���Y�����Ѓ��ݣ�����^���Է�צ�ͱ������̓��ݸ����@����������Y�����ƣ��õij���Ŀǰ������ֻ����С��600 M3/h�����܉�M�㻯������ˎ�ȴ���ٵ���Ҫ��
���������ʺ̿Ƽ��Y�����σɷN�Y���ă��ݣ��Ƴ�������צ�Y�����_�����ٲ��ϡ������ܺġ����þS�o��������ٵ�Ч�����������m�ϻ�������ˎ���h�����I�����Ҫ��
1�����y����צ�ͱõĹ���ԭ��
����(1)�μ�צ�õĹ���ԭ����
������D1 ��ʾ���ڈD1a λ��A ǻ���M���4��ͨ���S���D�ӌ���ͬ���������\��A ǻ�ݷe׃���w������Ãȣ�B ǻ�ȵĚ��wҲ���D�ӌ��������µõ�����u���s���҂��Q�������^�̣��D1b λ��A ǻ�ݷe�^�m׃���^�m���⣬ͬ�r��B ǻ���ݷe���D�ӌ���ͬ���������\������u׃С���\�ӵ����Ś�ڽ�ͨ��λ�Ú��wͨ�^�Ś���ŵ���һ�����@���^��һֱ�����m���D1c λ�ã�������Ś�ͬ�r�M�У����Q�����Ś��^�̣��ڈD1c λ��A ǻ�_��������ݷe������Y����Bǻ���ݷe�_������С���Ś�Y�����D�ӓ�ס���M��ں��Ś�ڣ������Ԅ��P�]�����ã��ڈD1dλ���S���D�ӵ��\�D��B ǻ�ț]�б��ų�ȥ�Ě��w��A ǻ�ȱ�����Ě��w��ϵ���һ�𣬼Ȳ�����Ҳ���Ś⣬�҂��Q���^���^�̣�
�������g���؏�����3 ���^�̣��_�����B�m���g�����յ�Ŀ�ģ����ڱ�ǻ�ȟo����ˮ���͵Ƚ��|�������µă��ݣ��ܳ���N���W���w�����ⲻ�P䓲���������צ��߀�ܳ鸯�g�Ԛ��w���ں��졢��ˎ���������˹��I���ИI�õ��ˏV���đ��á�

1.�Ś�ڣ� 2.�D�ӌ��� 3.���w�� 4.�M���
�D1 �μ�צ�ù���ԭ��D
����(2)��Ҋ�Ķ༉צ��ԭ����
������D2 �͈D3 ��ʾ���ڵ�һ�����Ś��λ�ã��OӋһ���L�L��ͨ�����Ա��ڵ�һ���ų�ȥ�Ě��w���M��ڶ������M��ڡ�ͬ�r���˱��C�ڵ�һ���Ś�r���ڶ������w3B �_ʼ���⣬���Եڶ�����ͬ���D�ӌ��ȵ�һ�����һ���Ƕȵ���λ�ͨ�^�о��l�F����λ����30°��120°֮�g���Ǻ����ģ�������ĽǶ�߀��Ҫ�Mһ���о���ͨ�������OӋ��̫С�����˷������OӋ�������D�ӌ��Լ����ļ��D�ӌ���ͨ�����͕��l�F�����D�ӌ����������D�ӌ����D�ķ����������һ�����������S�ϾͳʬF�������Ͳ��֣��Q�������͡�

�D2 �����ͽY�������Sʾ��D

�D3 �����ͽY��ԭ��D
������Y���������c�����V�����ã��D�ӵķ��ö����ψD���ã��������o80 ���ĩ�ښW�ގ���I���a�^�@�ӵı��ԺaƷ���Ј�����õ��˷dz��õķ�����ʹ��Ч����Ŀǰ���Ї����õ�����V���IJ��á�
������D4 ��ʾ���乤���^�̞飺���w����w�M���ؼ��^�����M�뵽��һ�����w�ȣ�ͨ�^��һ���D�ӌ������ã����s���w�ؼ��^�����^�m�M���һ������ȣ��քeͨ�^�ڶ�����ǻ����������ǻ�͵��ļ���ǻ�����w�M���˱��^���L���֏��s���\�ӡ�

1.��w��2.��һ����ǻ��3.һ���D�ӌ���4.��һ�����壻5.�ڶ����D�ӣ�6.���ڶ�����ǻ��7.�ڶ������壻8.�������D�ӌ���9.��������ǻ��10.���������壻11.���ļ���ǻ��12.���ļ��D�ӌ���13.����
�D4 �ļ��ýY��ԭ��D
�������^�����Č���Լ��Ñ���ʹ�÷������ļӹ��ɱ������췽�������µ�ȱ�c���ٵ�һ�����塢�ڶ��������Լ��������������g�Ě��wͨ���L�����üӹ����ڼӹ���ɺ���wͨ��߀��Ҫ�й�ˇ���ܷ⣬����й©���۸���ĺ���^���±õ��L���^�L��ͬ�ӵ��ļ��ñȄe�ĸɱ�Ҫ�L������Ҫ�أ��ܸ�����������g���������������g�õ�̎����
���������ܺ�ʹ�÷���������ȱ�c�������ڳ��������צ��ʽ��ձõ�ԭ�탞�ݣ��D�Ӊ��s�^�������Ԅ��P�]�M��ں��Ś�ڣ����ԣ������������^�ߵĘO����ա������ښ��wͨ�������������ڽY�����Ƽs�������γ��^��Ě��w�������������ԣ�����ډ������ӵ�һ��ֵ��늙C�����������ȵ����������Ҳ��ɾ���׃�������w�^���s�ĬF���eͻ�������ԣ��ƿ��A��Ч�ʺܵͲ��ҕr�g̫�L��

�D5 ��צ�ͽY�������Sʾ��D
����(3)“��צ��”��ԭ�������ܷ�����
�����ĈD6 ���Կ�������һ�����Ś��1 �͵ڶ������M���1B ��ͬһλ�ã���һ����צ���D�ӌ�2 �͵ڶ�����צ���D�ӌ�2B ���෴�ģ������ϛ]���˚��wͨ�������������w���D���Լ�����͵�һ�����w�ȽY����ͬ�����ļ��͵ڶ����Y����ͬ�����g���e�ֲ����҂��Q�@�ӵĽY����“��צ��ʽ��ձ�”�����Ǵ˽Y�����ܱ��C��һ�����Ś�r�ڶ����������⣬�ڵ�һ���Ś�Y���r�ڶ�������Ҳ�Y������ͨ�^�ڸ����ϼӹ��_�A�Ě��wͨ���팍�F�����˱��C��Ӱ푚��w������������ĺ�ȱ��^��
�����������o80 ���ĩ��Ӣ��ij��˾���a�^�@�ӵı��Ժ�Ŀǰ���Ї����õ��˲��ã��ļ����OӋ��ɺ�������D��ʾ��Y����

�D6 ��צ�ͽY��ԭ��D
������D7 ��ʾ�����w���M���ͨ�^�D�ӌ�3 �Լ���ǻ2�����sͨ�^����4 �ϵ�һ�����w�Ś��(ͬ�r���Ƕ������w�M���) �M��ڶ������w6�ȡ�������ƣ����w�ؼ��^����������ԭ����һ���ľ��x������ͨ�^��������ǻ9 ���ļ���ǻ11����ͨ�^�Ś���ų����⡣
����������ԭ�����^���ļӹ��ɱ������췽�������µ�ȱ�c���ٸ�����Ȼ�^������̫�L�����D�ӳɷ�צ���ã���ƽ�⾫��Ҫ����ߣ������õ��L����Ȼ�^�L�������^�أ��� ����ͨ�^������{�����Ś⣬��һ���Ś�ھ�����һ�����M��ڣ������^���К��w�����^С�������F�����F���O��������һ����Ӱ푡�

�D7 �ļ��ýY��ʾ��D
2��һ�N���͵Ķ༉צ��(������צ��)����ԭ��

�D8 ������צ�ͽY�������Sʾ��D

�D9 ������צ�ͽY��ԭ��D
�����ĈD9 ���Կ�������һ�����D�Ӟ���צ���ڶ����D�Ӟ鷴צ�����˱��C��һ���Ś�r�ڶ������⣬ͬ�r��һ���Ś�Y���r���ڶ�������Y�����ڶ����D�ӌ��c��һ���D���Ђ���λ���a �ȣ����Է����w�γɷ����F������D�ӌ�Ҳ�����������e���У�����Ȼ���Ա�����λ���a �ȣ��҂��Q�˷Nԭ���“������צԭ��”���@��һ�����ڸ����ϵĚ��wͨ������Ҫ�_�Aͨ�������C���w��ͨ���������λ���ˣ�ͨ�^�OӋ�ļ��þ���׃�������½Y�����D����ȫ���õą����D���D10 �п��Կ����������ѽ����������dz���������Փ�Ͽ��ԟo�ޱ����Č��`���]���ӹ��͏���׃�ε�Ӱ푣���Ȼ����һ���ĺ�ȡ����_���w�e׃С�����C���������Դ���Ƚ��͡�

�D10 ������צ�ýY��ʾ��D
������������췽�������µă��c�����w�eС�����ڸ����ĺ�ȿ��ԃ����OӋ����׃�����ݗU�ɱõ��L�ȸ��̣����S��������׃�̣����Դ���ȵĹ�ʡ���ϣ����ͼӹ��ɱ�����������Ҫ�����\ݔ�ɱ�����߽M�bЧ�ʣ�������׃�����OӋ���L�ڹ����ܺĸ��ͣ��Ȳ����wͨ���������ڱõ��OӋ���٣��ڴ�≺���ܺ�Ҳ�]��ͻȻ���L��
3���Nԭ���Č��H���ܜyԇ���^
������ձ�����Ҫ�������ИO����ա�������ʺ��ܺġ����ڽY����ʽ���ƣ��O����ն�����ͨ�^��ͬ�ļӹ����Ȍ��F����˳����������ܺ������Q���˱õ����܃�Խ�̶ȣ�
����(1) �Nԭ�����͵Č��H���ٱ��^(LH-150PHC ����)

�D11 ��ͬ���͌��H���ٱ��^
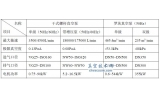
������D11 ��ʾ�� ���Nԭ���ı�����ډ���1000 Pa �ԃȵą^�g�����ٲ��]�����@�IJ�e������ډ���1000 Pa~2000 Pa ֮�g������ԭ���ĸɱÌ��H���ٞ鷴צԭ����������צԭ����80%���ң�������ډ������^2000 Pa �r������ԭ��צ�õČ��H���ٴ���Ƚ��ͣ����F���@�ij����c������צԭ������ډ���10000 Pa ���ϲ��_ʼ˥�p����������צ��������ډ���25000 Pa ���_ʼ˥�p���ɴ˿�Ҋ��������צԭ�������N���wԭ���г��Ч�����Խ�ġ�
����(2) �Nԭ�����͵Č��H�ܺı��^(��LH-150PHC ����)

�D12 ��ͬ���͵��ܺı��^
������D12 ��ʾ������ډ�����2000 Pa ���Ϻ�����צ�õ��ܺľʹ�����������_���M�d���ʵ�3 ��4 ������������צԭ���ͷ�צ�ò���������������������r����������צ�ô��ڃȲ��^���s��r�������f���D��֮�g����λ�Ƕ��Լ������õ��OӋ�Ǵ���ȱ�ݺͲ���ġ�
4���YՓ
����ͨ�^�������N�Y����ʽ�ı��^�����Եó����½YՓ��צ��ʽ��ձ����ĽY���������͡���צ�ͺ�������צ�����N�Y��������������צ�ͽY�����Դ���ȿs�̱õ��L�ȡ����s�����IJ��ϡ���߳��Ч�ʡ����ͼӹ����ȡ���߳�����ܵȣ���צ��ʽ��ձõİlչ���ռ�����������Ƅ����á�
�����īI
����[1] �_����.����OӋ�փ�.3 ��[M].�������������I������,2006.
����[2] ��ɺ�.��չ��̼��g.1 ��[M].���������W���I������,2006.
����[3] ���Գ�.��չ�ˇ�c���g.1 ��[M].������ұ�I������,2006.
����[4] ���˺㣬�͵¼�.��ի@���O��[M].������ұ�I������,2001.
����[5] G.C �Ơ�(����)����(�g��).��ˎ���a�O�䑪���c܇�g�OӋ.2 ��[M].���������W���I�����磬2008.
����[6] �����ᣬ����.������צ��ʽ��ձ�[P].�Ї�������ZL 2009 1 0157920.3��2009.12.23.
����[7] �R�ݣ������. צ��ʽ��ձ��D��[P]. �Ї�������200710097890.2��2007.09.12.
����[8] ��־���͵¼�.צ�ͱ��D����Փ�;�Ӌ��Cģ�M�о�[J].��ꖺ��չ��I�WԺ�W��2002��19(1).
����[9] Ҧ��������.צ�ͱ��;����о�[J].��գ�1989��(3).